Introduction
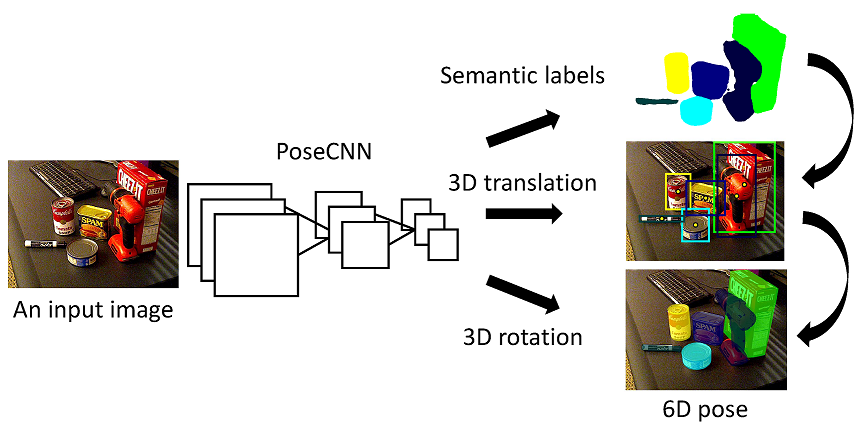
Estimating the 6D pose of known objects is important for robots to interact with the real world. The problem is challenging due to the variety of objects as well as the complexity of a scene caused by clutter and occlusions between objects. In this work, we introduce PoseCNN, a new Convolutional Neural
Network for 6D object pose estimation. PoseCNN estimates the 3D translation of an object by localizing its center in the image and predicting its distance from the camera. The 3D rotation of the object is estimated by regressing to a quaternion representation. We also introduce a novel loss function that enables PoseCNN to handle symmetric objects. In addition, we contribute a large scale video dataset for 6D object pose estimation named the YCB-Video dataset. Our dataset provides accurate 6D poses of 21 objects from the YCB dataset [1] observed in 92 videos with 133,827 frames. We conduct extensive experiments on our YCB-Video dataset and the OccludedLINEMOD dataset [2] to show that PoseCNN is highly robust to occlusions, can handle symmetric objects, and provide accurate pose estimation using only color images as input. When using depth data to further refine the poses, our approach achieves state-of-the-art results on the challenging OccludedLINEMOD dataset.
Publication
Yu Xiang, Tanner Schmidt, Venkatraman Narayanan and Dieter Fox. PoseCNN: A Convolutional Neural Network for 6D Object Pose Estimation in Cluttered Scenes. In Robotics: Science and Systems (RSS), 2018. arXiv
Code and Datasets
The YCB-Video 3D Models ~ 367M
The YCB-Video Dataset Toolbox (github)
References
1. B. Calli, A. Singh, A. Walsman, S. Srinivasa, P. Abbeel, and A. M. Dollar, “The YCB object and model set: Towards common benchmarks for manipulation research,” in International Conference on Advanced Robotics (ICAR), 2015, pp. 510–517.
2. A. Krull, E. Brachmann, F. Michel, M. Ying Yang, S. Gumhold, and C. Rother, “Learning analysis-by-synthesis for 6D pose estimation in RGB-D images,” in IEEE International Conference on Computer Vision (ICCV), 2015, pp. 954–962.
Acknowledgments
This work was funded in part by Siemens and by NSF STTR grant 63-5197 with Lula Robotics.
Result Video
Contact : yuxiang at cs dot washington dot edu, tws10 at cs dot washington dot edu
Last update : 04/13/2018